
Linear Regression in Go - Part 3
Fri, Dec 4, 2015 |In the previous posts we talked about how to predict a continuous value using a linear function and a way to measure the error given a matrix of test data and an hypothesis set of values theta.
In this post we’re describing a function that will converge the vector theta to its optimal values (or local miminum) which is called gradient descent.
Just to keep things simple, let’s assume we have a vector $\theta$ with just 2
dimensions (slope and intercept values of a simple line). If we plot the graph of
$\theta_1$, $\theta_2$ and the result of the cost function we’ll have something like:
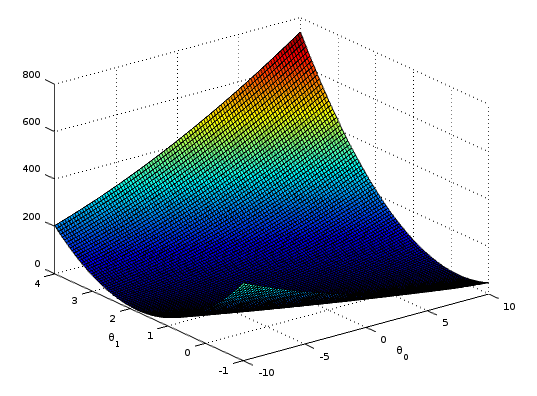
Given any random starting point $\langle\theta_0,\theta_1\rangle$ if we calculate
the partial derivative of the function we’ll have a direction pointing away from the
local minimum, so we can move a step closer ($\alpha$) toward the opposite direction.
This is our gradient descent in mathematical terms:
$$\theta_j := \theta_j - \alpha \frac{\partial}{\partial \theta_j} J(\theta_0, \theta_1)$$
The step we take every iteration toward the local minimum $\alpha$
is called learning rate (or sometimes step size ). For now
let’s assume we use a fixed value and the same is for the numer of
iterations we need to perform in order to get to the local minimum.
Deriving this formula results in the following:
or in a more general way (if we assume $x_0^n=1$ ):
But what we want to implement is a vectorized version of that formula, which is:
Again, using vectors the result is much more readable and easier to implement. We can finally get to our actual go implementation:
1// m = Number of Training Examples
2// n = Number of Features
3m, n := X.Dims()
4h := mat64.NewVector(m, nil)
5new_theta := mat64.NewVector(n, nil)
6
7for i := 0; i < numIters; i++ {
8 h.MulVec(X, new_theta)
9 for el := 0; el < m; el++ {
10 val := (h.At(el, 0) - y.At(el, 0)) / float64(m)
11 h.SetVec(el, val)
12 }
13 partials.MulVec(X.T(), h)
14
15 // Update theta values
16 for el := 0; el < n; el++ {
17 new_val := new_theta.At(el, 0) - (alpha * partials.At(el, 0))
18 new_theta.SetVec(el, new_val)
19 }
20}h is a Dense Matrix Vector and numIters is a constant int64.
You can find the full implementation here
, and tests here
.
A good visual explanation is in the following video by prof. Alexander Ihler :
Edit (feb 6 2016): I’ve fixed the code so now h and new_theta are of type Vector instead of DenseMatrix.